/webcode.jsp
/de/suche/index.jsp
https://publikationen.dguv.de/DguvWebcode?query=
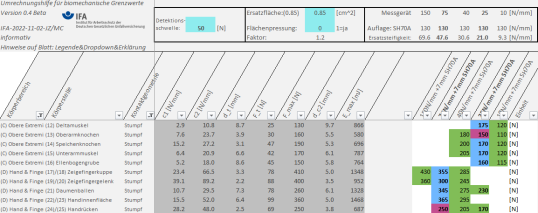
Die DGUV hat mehrere Forschungsprojekte (FP317, FP411, FP430) gefördert, in denen das IFA zusammen mit anderen Forschungseinrichtungen biomechanische Grenzwerte ermittelt hat, die nun bei der Bewertung mechanischer Gefährdungen durch sogenannte kollaborierende Roboter (Collaborative Robots, Cobots) herangezogen werden können. Für verschiedene Körperstellen mit unterschiedlichen Gewebekonstellationen (Haut, Muskel, Fett, Knochen) sind dabei charakteristische Deformationen in Abhängigkeit von Kraft und Druck tolerierbar, woraus spezifische Steifigkeiten resultieren. In der betrieblichen Praxis muss die Stoßkraft der Cobots mit geeigneten Messgeräten gemessen werden, um die Einhaltung der Grenzwerte sicherstellen zu können. Da sich die für verschiedene Körperregionen ermittelten Steifigkeiten teilweise von den in Messgeräten zum Einsatz kommenden Federraten unterscheiden, bedarf es der Umrechnung der gemessenen Kraft gemäß der tatsächlichen Konstellation. Hier setzt die Praxishilfe des IFA an: Die Umrechnungshilfe ermittelt energetisch optimierte Werte, die die reale Steifigkeit der einzelnen Messgeräte berücksichtigen, und ermöglicht so die Risikoeinschätzung dynamischer Stoßbelastungen mit nur wenigen Messungen.
Die Umrechnungshilfe entstand im Auftrag der Berufsgenossenschaft Holz und Metall (BGHM) im Rahmen des Projekts IFA 5160. Als Grundlage für die Umrechnung dienen die im IFA Report 2/2022 ermittelten Biomechanischen Korridore. Zudem wird die Detektionsschwelle des Cobots berücksichtigt, um den Energieanteil zu bestimmen, der für die Umrechnung verwendet wird. Neben geglätteten Spitzendruckwerten kann die Tabelle zusätzlich auch einen Wert für die Flächenpressung (mittlerer Druck) ausgeben. Voreingestellt sind Steifigkeiten in fünf Clustern; die Tabelle ermöglicht aber auch Beurteilungen mit weniger Messgeräten: So kann eine bekannte Messgerätesteifigkeit auch manuell eingegeben werden.
Die hier zur Verfügung gestellte Umrechnungshilfe des IFA vereinfacht die Risikobeurteilung für Arbeitsplätze mit kollaborierenden Robotern deutlich. Wie genau die kritischen Prüfpunkte mithilfe der Umrechnungshilfe ermittelt werden können, erläutert der Anwendungsleitfaden (PDF, 873 kB, nicht barrierefrei) .
| Download Version 0.4 Beta (XLSX, 355 kB) |
| - Aktualisiert am 11.11.2022 - |
Die Tabelle wurde gemäß dem Stand von Wissenschaft und Technik sorgfältig erstellt. Sie wird dem Nutzer unentgeltlich zur Verfügung gestellt. Die Haftung des Instituts für Arbeitsschutz der Deutschen Gesetzlichen Unfallversicherung (IFA) ist damit auf Vorsatz und grobe Fahrlässigkeit (§ 521 BGB) bzw. bei Sach- und Rechtsmängeln auf arglistig verschwiegene Fehler beschränkt (§§ 523, 524 BGB).
Das IFA ist bemüht, seine Homepage virenfrei zu halten, gleichwohl kann keine Virenfreiheit der zur Verfügung gestellten Software und Informationen zugesichert werden. Nutzerinnen und Nutzern wird daher empfohlen, vor dem Herunterladen von Software, Dokumentationen oder Informationen selbst für angemessene Sicherheitsvorkehrungen und Virenscanner zu sorgen.
Die Umrechnungshilfe ist Freeware und darf gewerblich, für Lehrzwecke und zum privaten Gebrauch genutzt werden. Die Weitergabe des Tabellenprogramms an Dritte ist erlaubt. Eine Veränderung der Tabelle oder ein Downloadangebot von fremden Servern aus hingegen ist nicht gestattet. Vor der Verwendung sollte geprüft werden, ob die aktuelle Version vorliegt und die Tabelle nicht zurückgezogen wurde.
Bei Fragen oder Verbesserungsvorschlägen wenden Sie sich bitte an das IFA (siehe Kontakt). Die Software steht zur freien, eigenständigen Nutzung zur Verfügung. Es besteht kein Anspruch auf Support von Seiten des IFA. Weitere Informationen finden sich im Anwendungsleitfaden (PDF, 873 kB, nicht barrierefrei) , der unbedingt vor dem Download der Software konsultiert werden sollte.
Barrieren bei der Nutzung der Software deklariert die Erklärung zur Barrierefreiheit.

Ende 2023 ist die neue Norm ISO/PAS 5672 erschienen: Robotics - Collaborative applications - Test methods for measuring forces and pressures in human-robot contacts


Zimmermann, J. et al.: Application example: Evaluation of mechanical collisions at workplaces with collaborative robots (PDF, 310 KB, nicht barrierefrei) in the Conference Proceedings of the 11th International Conference on Safety of Industrial Automated Systems (SIAS), 2024, Tampere, Finland (ISBN: 13 978-952-5183-64-1)
Kapitel 9.3. Sichere Mensch-Roboter-Kollaboration in Grenzwerteliste 2024 - Sicherheit und Gesundheitsschutz am Arbeitsplatz (IFA Report 2/2024). S. 236-242. Hrsg.: Deutsche Gesetzliche Unfallversicherung (DGUV), Berlin
Behrens, R.; Zimmermann, J.; Wang, Z.; Herbster, S.; and Elkmann, N.: Development of Biomechanical Response Curves for the Calibration of Biofidelic Measuring Devices Used in Robot Collision Testing. J Biomech Eng. 146 (2024) No. 4
Zimmermann, J.: Sicherheit von Kollaborierenden Robotern richtig bewerten – Zum Stand der Forschung. sicher ist sicher 3/2023
Unfallprävention: Digitalisierung - Technologien
Tel: +49 30 13001-3510