/webcode.jsp
/en/search/index.jsp
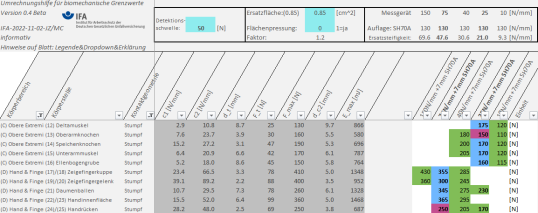
The DGUV has funded several research projects (FP317, FP411, FP430) in which the IFA, together with other research institutions, has identified certain biomechanical limit values that can now be used in the assessment of mechanical hazards arising from so-called collaborative robots (cobots). Different locations of the body with different tissue constellations (skin, muscle, fat, bone) can tolerate characteristic deformations depending on the force and pressure, resulting in specific stiffnesses. In day-to-day practice, the impact of cobots must be measured with suitable measuring devices in order to ensure compliance with the limit values. Since the stiffnesses determined for different body regions sometimes differ from the spring rates used in measuring devices, the measured force must be converted in a way that matches the actual constellation. This is where the IFA’s practical solution comes in: The Conversion Table determines energetically optimised values that take account of the actual stiffnesses of the individual measuring devices, thus allowing a risk assessment of dynamic impact loads with only a few measurements.
The Conversion Table was commissioned by the Social Accident Insurance Institution for Wood and Metal (BGHM) as part of project IFA 5160. The conversion is based on the biomechanical corridors determined in the final project report by IFA and Fraunhofer IFF . Another element that is taken into account is the detection threshold of the cobot, as it allows the determination of the energy fraction that needs to be used for the conversion. In addition to smoothed peak pressure values, the table also provides a value for surface pressing (average pressure). Stiffnesses are set as defaults in five clusters; however, the table also allows assessments involving fewer measuring devices, and it is therefore also possible to enter a known measuring device stiffness manually.
The Conversion Table provided here by the IFA significantly simplifies the risk assessment for a workplace involving collaborative robots. The Application Guideline (PDF, 375 kB, non-accessible) contains an overview of how exactly the critical test points can be identified with the help of the Conversion Table.
| Download Version 0.4 Beta (XLSX, 347 kB) |
| - Updated on 11 November 2022 - |
The table was compiled with care and in accordance with state-of-the-art science and technology. It is available to users free of charge. The liability of the Institute for Occupational Safety and Health of the German Social Accident Insurance (IFA) is thus limited to intent and gross negligence (section 521 of the German Civil Code, BGB) and, in the case of material defects and defects of title, to fraudulently concealed defects (sections 523, 524 BGB).
The IFA undertakes to keep its website free from viruses. Nevertheless, no guarantee can be given that the software and information provided are virus-free. Users are therefore advised to take appropriate security precautions and to use a virus scanner prior to downloading software, documentation or information.
The Conversion Table is freeware and may be used commercially as well as for teaching purposes and for private use. The distribution of the table programme to third parties is permitted. However, no permission is given for the modification of the table or for downloads offered by third-party servers. Prior to implementation, please check online whether the version you have is the latest and make sure the table has not been recalled.
If you have any questions or suggestions for improvement, please contact the IFA (see Contact). The software is available for free, provided that it is used as a stand-alone application. It involves no entitlement to IFA support. Further details can be found in the Application Guideline (PDF, 375 kB, non-accessible) , which must be consulted prior to downloading the software.
Barriers to using the software are declared in the accessibility statement.

The new standard ISO/PAS 5672 was published at the end of 2023: Robotics - Collaborative applications - Test methods for measuring forces and pressures in human-robot contacts


Zimmermann, J. et al.: Application example: Evaluation of mechanical collisions at workplaces with collaborative robots (PDF, 310 KB, non-accessible) in the Conference Proceedings of the 11th International Conference on Safety of Industrial Automated Systems (SIAS), 2024, Tampere, Finland (ISBN: 13 978-952-5183-64-1)
Behrens, R.; Zimmermann, J.; Wang, Z.; Herbster, S.; and Elkmann, N.: Development of Biomechanical Response Curves for the Calibration of Biofidelic Measuring Devices Used in Robot Collision Testing. J Biomech Eng. 146 (2024) No. 4
Accident Prevention: Digitalisation - Technologies
Tel: +49 30 13001-3510